1、创建一个10m x 10m的空映射。
命令行键入:
map = robotics.BinaryOccupancyGrid(10,10,10);
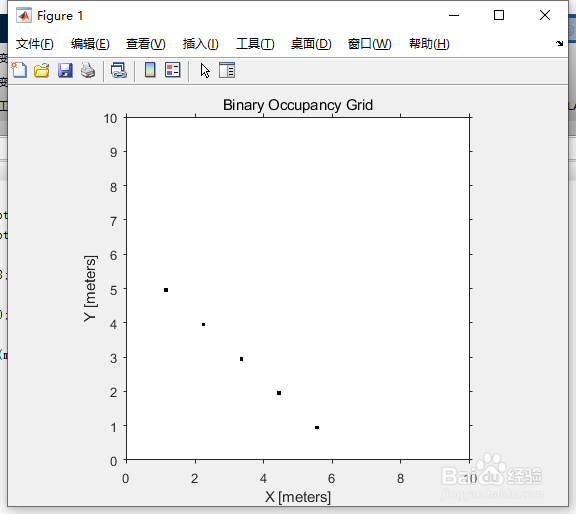
2、设置世界位置和显示地图的占用。
命令行键入:
map = robotics.BinaryOccupancyGrid(10,10,10);
x = [1.2; 2.3; 3.4; 4.5; 5.6];
y = [5.0; 4.0; 3.0; 2.0; 1.0];
setOccupancy(map, [x y], ones(5,1))
figure
show(map)
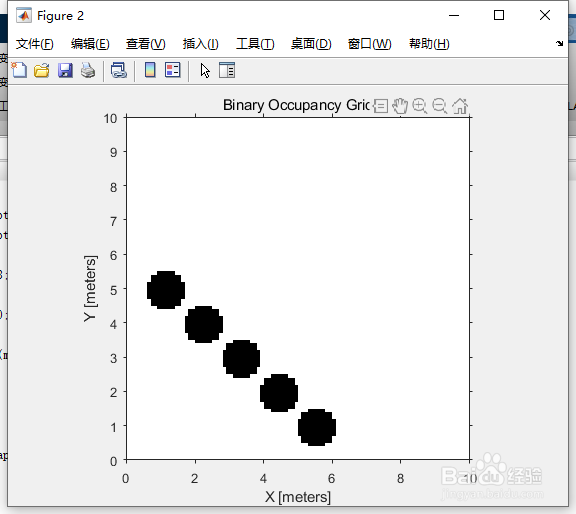
3、以给定的半径充气占用的位置。
命令行键入:
inflate(map, 0.5)
figure
show(map)
4、从世界位置获取网格位置。
命令行键入:
ij = world2grid(map, [x y]);

5、将网格位置设置为空闲位置。
命令行键入:
setOccupancy(map, ij, zeros(5,1), 'grid')
figure
show(map)
